
감각은 더 많은 것을 누릴 자격이 있다: 고정밀 햅틱스로 더욱 안전한 주행
2012년 Tesla 모델 S에 대형 스크린 중앙 콘솔 디스플레이가 도입된 이후, 기존의 기계식 차량 컨트롤 장치와 스위치는 점점 사라지고 통합형 터치스크린 사용자 인터페이스가 그 자리를 대신하고 있습니다. 이 접근 방식은 소프트웨어 기반 HMI(인간 기계 인터페이스: Human Machine Interface)의 모든 이점을 포함하고 있으며, 깔끔한 인테리어 디자인 개념을 가능하게 지원합니다. 그러나 중요한 차량 제어를 이렇게 중앙집중식 터치 컨트롤로 통합하는 것에는 큰 문제가 있습니다. 사용자가 사용 중에 디스플레이를 보고 개입해야 한다는 것입니다.1
연구에 따르면 터치스크린 기반 인포테인먼트 시스템을 사용할 때 운전자의 반응 시간이 50% 이상 증가할 수 있다고 합니다.2 앞으로 Euro NCAP 같은 차량 테스트 기관은 운전자의 인지 부하 감소 및 도로 주시 유지를 위해, 비상등 같은 중요 차량 기능 제어용 개별 버튼들에 대한 점수를 평가 시스템에 할당할 계획입니다.3 이는 이미 물리적 제어를 터치스크린 HMI로 교체한 차량 제조업체들에게 다음과 같은 극복해야 할 과제를 제기합니다.
-
사용자가 “소프트웨어 정의” 접근방식에 익숙해져 있습니다. 사용자가 스마트 폰을 통해 이미 경험하고 익숙해진 터치스크린 경험으로부터 벗어나게 하려면 사용자 습관을 바꿀 정도의 몰입감 있는 솔루션이 필요합니다.
-
기계식 버튼으로 되돌리는 일은 추가 스위치를 설치할 실용 공간이 없다거나 “버튼 아일랜드”로 깔끔한 미니멀리즘 “샤이테크” 인테리어를 망치고 싶지 않다는 캐빈 디자이너의 바램에 반할 수 있습니다.
-
EV 채택이 둔화되고 경쟁이 치열해지면서 업계가 직면한 비용 압박을 감안할 때, 개별 컨트롤 요소의 추가로 인한 비용 상승은 다른 경쟁 기능들에 비해 정당화하기 어려울 수 있습니다.
그러나 이러한 모든 어려움에도 불구하고, 이들 과제에 해결책을 제시하는 기술이 있습니다.
소프트웨어 정의 차량
일부 차량 제조업체는 이미 터치 컨트롤을 구현했지만, 기계식 컨트롤에서 가상 버튼으로의 전환이 항상 순조로운 것은 아니었으며, 당시 사용 가능한 최고의 기술을 이용한 비용 최적화된 설계는 시장에서 그다지 좋은 반응은 아니었습니다. 또한 최대 5년에 이르는 자동차 설계 사이클에 미뤄 볼 때, 신차는 사용자 경험 측면에서 대개 소비자 기기보다 뒤처집니다. 왜냐하면 차량이 대리점 전시 공간에 도착할 때까지 하드웨어는 이미 구식이 되고 소프트웨어는 업데이트와 유지 관리에 많은 비용이 들기 때문입니다.
자동차 제조업체들은 이 분야에 많은 투자를 하고 있으며, 소프트웨어-정의-차량 아키텍처의 출현으로 사용자 대면 기능의 개발과 마무리는 더욱 빨라져 차량 생산이 시작되는 시점과 더욱 가까워지고 있습니다. 또한 OTA(Over-the-air) 기능 업데이트를 통해 차량이 도로에 나가면 최적화를 수행해 새로운 기능이나 성능 조정을 적용함으로써 기본 하드웨어 설계를 최대한 활용합니다.
차량이 이제 구매 제품으로부터 커넥티드 모빌리티 생태계에서 사용되는 기기나 서비스로 점점 전환됨에 따라, 사용자는 디지털 방식의 제어 인터페이스가 자신이 선호하는 애플리케이션과 상호 작용하기를 요구하는데, 이는 사용자가 스마트폰 경험에서 기대하는 것과 유사합니다. 근래 최신 스마트폰에 카메라 버튼이 도입된 것은 자동차 업계에 나타날 트렌드를 보여주는 것입니다. 사용자는 스마트폰으로 사진을 찍을 때 촉각 컨트롤 기능이 있어 피사체에서 눈을 뗄 필요가 없기를 바라고 있습니다. 이는 자동차에도 동일하게 적용됩니다. 운전자는 촉각 컨트롤 기능이 있어 눈은 도로에서, 손은 바퀴 제어에서 떼야 할 이유가 없기를 원합니다.
내부의 컨트롤 기능에 소프트웨어-정의 개념을 적용하면 완전히 새로운 가능성의 세계가 열립니다. 간단한 기계식 버튼을 단일 기능 버튼 클릭으로 교체하는 것은 전체 시스템에 거의 가치를 더하지 못합니다. 반면 프로그램 가능한 가상 표면은 중앙 집중형 HMI 프로세싱을 활용하여 다양한 주행 환경에서 햅틱 피드백을 즉각적으로 재구성할 수 있습니다. 이렇게 하면 각 제어 버튼의 기능적 깊이는 증가하고 운전자의 주의산만으로 이어질 수 있는 잡다한 것들은 줄어듭니다.
이러한 유연성은 자동차 제조업체가 운전자 컨트롤을 위한 안전 지침(예: NCAP가 제안한 지침 등)에 적응하는 데 도움이 될 수 있습니다. 소프트웨어 기반 접근 방식을 사용하면 지역적 차이를 쉽게 관리할 수 있으며, 다양한 유형의 컨트롤 피드백이나 안전 규정 및 지침을 살펴 현지 시장 선호도를 고려할 수 있습니다.
클릭의 해부
이 글의 제목에서 알 수 있듯이, 최근 차량 컨트롤에서 햅틱스 구현과 관련하여 더 많은 문제를 해결해야 합니다. 이는 반드시 자동차 사용에 적합한 기술의 부족으로 인한 것 만은 아니고, 자동차 애플리케이션에서 소비자 수준 햅틱 성능 구현의 복잡성으로 인한 것입니다. 여기에는 종종 매우 다양한 물리적 완건성 요건 및 연계된 사용 사례가 포함됩니다.
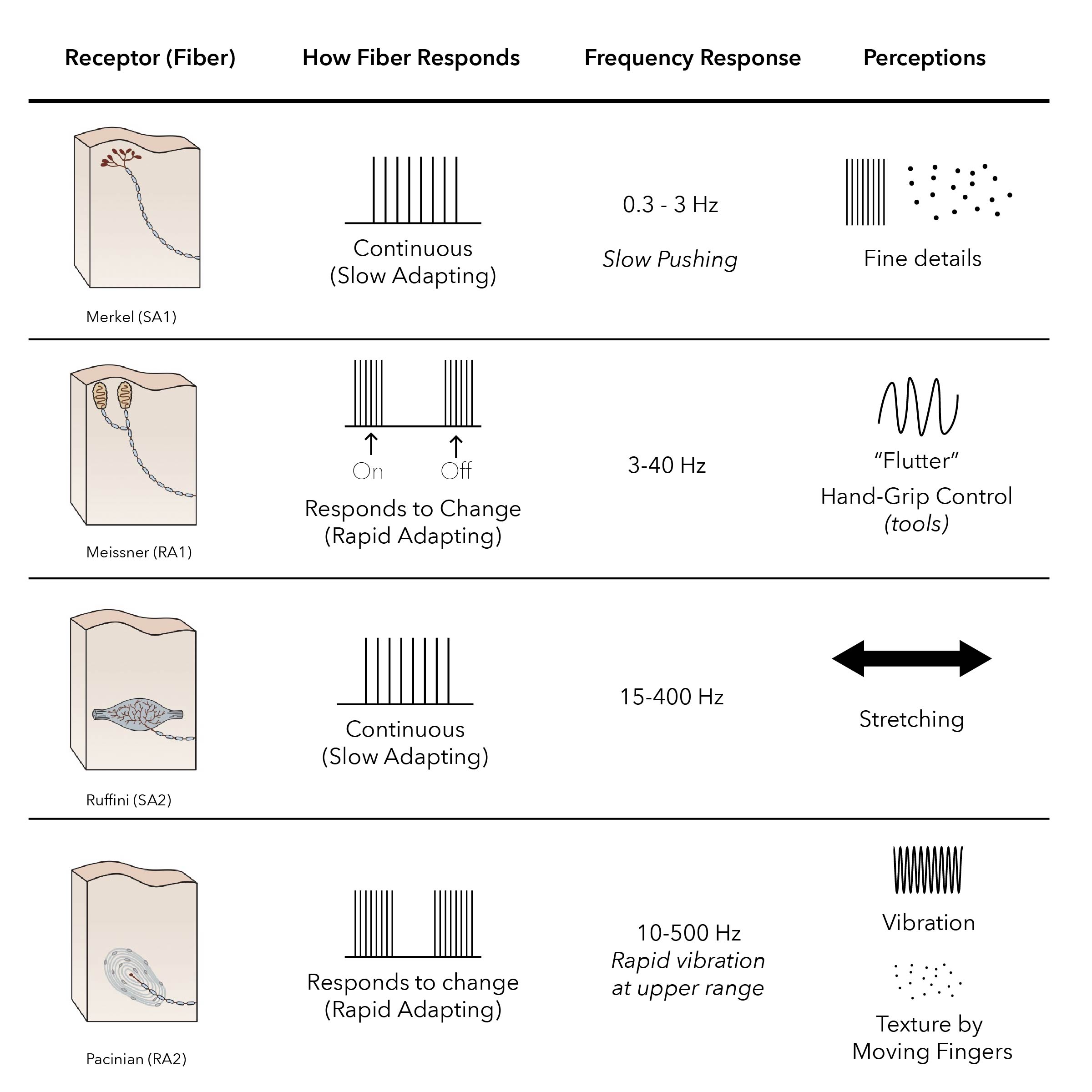
햅틱스 경험을 더욱 안전하고 몰입감 있게 만드는 방법을 이해하려면 먼저 햅틱스 피드백의 구조를 이해해야 합니다. 먼저 생물학적으로 말하자면, 인간의 촉각 시스템에는 표면 위로 손가락을 움직일 때 최대 500Hz의 진동과(RA2 Pacinian 수용체) 질감을 인식할 수 있는 특정 기계적 자극 수용체들이 있습니다(그림 1 참조). 이러한 감각의 인지된 강도 또는 선명도는 액추에이터(피드백을 생성하는 기계 장치)가 이들 수용체를 자극할 수 있는 방식과 직접적인 관련이 있습니다.

클릭의 두 가지 주요 구성 요소는 햅틱의 강도 또는 힘, 그리고 햅틱의 질입니다(그림 2 참조.) 모든 햅틱 액추에이터 기술이 근본적으로 짧고 강력한 클릭 효과를 생성할 수 있는 것은 아닙니다.
사실 오늘날 도로 위의 많은 시스템들은 개방 루프 햅틱스 회로를 사용하며, 이는 액추에이터에 한 방향으로 “블라인드” 전압 펄스를 보냅니다. 이들 펄스는 설계 중에 실험실에서 햅틱 피드백 가속 곡선을 측정하고 원하는 효과가 달성될 때까지 펄스 파형을 수정함으로써 가능한 최상의 성능을 얻도록 최적화됩니다. 이는 실험실 환경에서는 작동할 수 있지만, 실제 환경에서는 생산에서의 부품 간 차이와 현장의 온도 변동로 인해 실망스러운 성능을 나타내며, 이는 기계적 자극 수용체의 모든 능력을 이용하지 않는 저품질의 확실하지 않은 햅틱 피드백 경험을 초래할 수 있습니다!
고정밀도 햅틱스
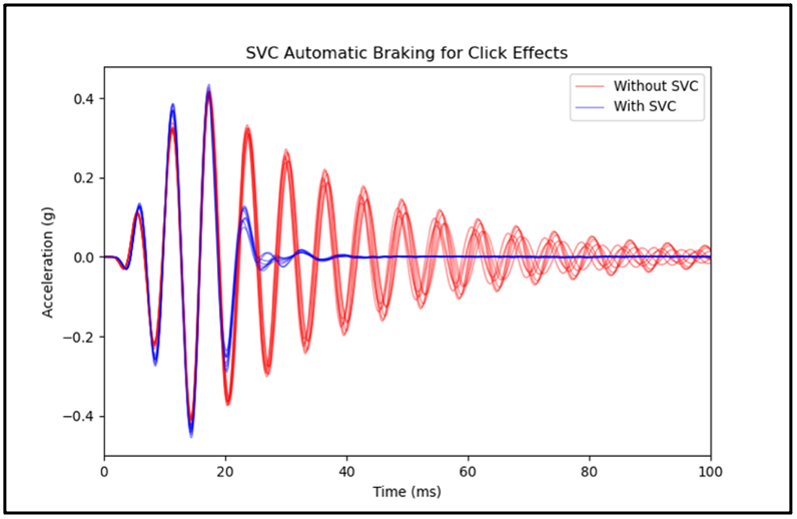
사용자가 노트북 터치패드 또는 스마트 폰에서 기대하는 경험과 유사하게 더욱 명확하고 더 확실한 피드백을 생성하기 위해, Sensorless Velocity ControlTM 또는 SVC라는 방법을 사용하여 감각이 느낄 수 있는 경험을 제공하는 HD 햅틱스 효과를 생성할 수 있습니다! SVC는 고급 알고리즘을 사용하여 액추에이터가 움직일 때 액추에이터에서 돌아오는 신호를 모니터하며, 드라이브 및 제동 펄스를 지속적으로 조정하고 보상하여 가능한 최상의 “클릭” 반응을 달성합니다. (그림 3 참조.)
SVC의 많은 이점 중 하나는 고객이 원하는 가속 사양을 달성하기 위해 클릭 파형 펄스에 오버드라이브 및 브레이킹을 자동으로 적용한다는 것입니다. 또한 대량 생산에서 제조 공차 전반에 걸쳐, 그리고 실제 응용분야의 다양한 주변 작동 온도 전반에서, 일관된 성능을 제공하기 위해 사용될 수 있습니다. 이는 제어 표면이 여러 개의 상이한 액추에이터를 가질 수 있거나, 동일한 시그니처 클릭을 보여야 하는 여러 제어 표면이 한 캐빈에 있을 때 특히 중요합니다.
이 클릭이 차량 수명 기간 동안 계속 동일하게 유지되게 하는 것도 중요합니다. 액추에이터는 시간이 지남에 따라 노후되어 부하 임피던스, 기계적 강성, 공명 주파수가 달라질 수 있습니다. 이로 인해 개방 루프 설계를 이용하는 활성 햅틱스 시스템의 클릭 응답이 불량해집니다. SVC는 시간 경과에 따른 액추에이터의 상태를 진단하고, 스마트 폐쇄-루프 신호 처리를 드라이버 아웃풋 파형에 적용함으로써 이러한 에이징 영향을 보상할 수 있으며, 자동차 미션 프로필을 위해 클릭을 “명확하게” 유지합니다.
또한 상업적 관점에서 SVC는 성능을 희생하지 않고 더 작거나 더 낮은 비용의 액추에이터 사용을 가능하게 하지만, 가장 중요한 것은 터치 인풋 피드백을 보다 자연스럽고 인지하기 쉽게 만들어 운전자의 인지 부하를 감소시켜 전체 사용자 경험을 더욱 개선할 수 있다는 것입니다.
햅틱스 컨트롤 간소화
| 기존의 분리된 솔루션 | 통합된 Cirrus 솔루션 |
|---|---|

|

|
| 저품질의 “불안한” 햅틱스 효과 | 명확하고 뚜렷한 고정밀 질감의 햅틱 효과 |
| 복잡하고 시간 소모적인 소프트웨어 및 하드웨어 통합 | 간소화된 하드웨어 및 소프트웨어 통합: 1-칩 햅틱스 |
| 단일 액추에이터 지원 | 라인 마지막의 보정 불필요 |
| 라인 마지막의 값비싼 공장 보정 필요 | 라인 마지막의 보정 불필요 |
| 유닛 간의 성능 일관성 없음 | Sensorless Velocity Control을 사용한 일관된 성능 |
폐쇄루프 제어를 사용한 고정밀 클릭의 구현은 간단하지 않으며 피드백 센서, 첨단 소프트웨어 알고리즘, 저지연 DSP 처리를 결합한 복잡한 시스템이 요구됩니다.
그림 4에서는 다양한 액추에이터 유형을 효과적으로 구동하기 위해 필요한 모든 회로를 결합한 1-칩 통합 드라이버 솔루션을 사용하는 Cirrus 접근방식의 이점과 기존의 “분리된” 햅틱스 구현을 비교합니다. 또한 온-칩 전압 및 전류 모니터링을 이용해 SVC를 구현하여 생산 내 부품 간 차이 및 주변 작동 온도 조건의 변화에 관계없이 액추에이터 성능을 능동적으로 감지하고 관리합니다.
SVC 기능 외에도 이 CS40L5x 시리즈는 호스트 프로세서의 저지연 파형 생성 및 합성 작업을 단순한 햅틱 효과 생성으로 넘깁니다. 메모리의 수많은 다양한 햅틱 파형을 저장하고 스트리밍할 필요 없이, 호스트 프로세서는 더 높은 수준의 스크립트를 사용하여 다양한 UI 컨텍스트에 대해 햅틱 효과 시퀀스를 생성할 수 있습니다. 이는 리소스가 제한된 장치에 큰 이점이 되며, 저비용 마이크로 컨트롤러를 사용할 수 있어 소프트웨어 복잡성을 줄이고 개발 속도를 높일 수 있습니다.
미래 가능성
제어 스위치에 대한 기존의 활성 햅틱 시스템 구현은 일반적으로 개별 앰프와 결합된 로컬 소프트웨어 스택 구동 마이크로 컨트롤러를 사용하여 변환기를 구동하는 전압 펄스를 생성합니다. 햅틱 효과는 일반적으로 스위치 모듈 공급업체가 개발하는데, 차량 제조업체의 지침을 기반으로 하며 차량 수명 기간 동안 스위치 소프트웨어에 “추가됩니다”. OTA 소프트웨어 업데이트를 통해 햅틱 효과를 재구성할 수는 있으나, 필요한 소프트웨어 변경을 진행하려면 스위치 모듈 공급업체에 변경을 요청해야 합니다.
Open Alliance4 내에서 논의 중인 원격 제어 개념 및 10Base-T1S 같은 차량 통신 네트워크의 발전을 활용하여, 차량 제조업체들은 스위치 유닛의 로컬 마이크로 컨트롤러를 중앙 차량 컴퓨터에서 실행되는 원격 제어 소프트웨어 드라이버로 교체할 수 있습니다. 스위치 유닛의 MCU는 I2C 또는 SPI를 통해 햅틱스 드라이버에 연결된 통합 I/O가 있는 더 간단한 네트워크 트랜시버로 교체됩니다(그림 5 참조).
Cirrus 햅틱스 드라이버는 필요한 모든 신호 처리 및 파형 생성 기능을 통합하여 햅틱스 이벤트를 생성하기 때문에 다른 로컬 마이크로 컨트롤러가 필요하지 않습니다.

스위치 만들기
Cirrus는 다양한 하드웨어 및 소프트웨어 도구를 제공해, 엔지니어가 통합된 개발 환경에서 SVC를 포함해 이 글에서 논의된 여러 기능의 성과를 측정하고 평가하는 데 도움을 줍니다. Cirrus Logic CS40L5x 햅틱스 드라이버 IC 제품군 및 포괄적인 프로토타입 지원 서비스에 대한 자세한 내용은 automotivehaptics@cirrus.com 또는 현지 Cirrus Logic 영업 담당자에게 문의하시기 바랍니다.
작성자
Peter Hall - 비즈니스 개발 매니저, 자동차
Jorge Reynaga - 제품 매니저, 햅틱스
Miguel Sanchez - 애플리케이션 엔지니어, 햅틱스
i “4가지 유형의 기계적 자극 수용체의 속성” 다운로드 출처: https://mycourses.aalto.fi/pluginfile.php/910764/mod_resource/content/1/04%20-%20Activation%20Point.pdf 원래 인쇄 위치: Sensation and Perception(감각과 인지), 제7판 페이퍼백 – E. Bruce Goldstein(작성자)
1 Euro NCAP의 전략 개발 이사 Matthew Avery는 The Sunday Times 신문과의 인터뷰에서 이렇게 말했습니다. “터치 스크린의 남용은 업계 전반의 문제로, 거의 모든 차량 제조사가 주요 컨트롤을 중앙 터치스크린으로 옮겨 운전자로 하여금 도로에서 눈을 떼게 함으로써 주의 분산으로 인한 충돌 위험을 높이고 있습니다. 출처: https://etsc.eu/cars-will-need-buttons-not-just-touchscreens-to-get-a-5-star-euro-ncap-safety-rating/
2 주행 시 Android Auto 및 Apple CarPlay와 상호 작용: https://trl.co.uk/publications/interacting-with-android-auto-and-apple-carplay-when-driving
3 2026-2028년 NCAP 평가 계획, ‘운전자 개입’ 8 페이지 참조: “운전 컨트롤은 가장 중요한 차량 컨트롤의 사용 편의성에 관한 새로운 평가 요소입니다.” https://www.euroncap.com/media/79890/euro-ncap-rating-review-2023.pdf
4 TC18 – 원격 제어 프로토콜, Open Alliance 웹사이트: https://opensig.org/tech-committee/tc18-remote-control-protocol/
